the 600 mm/s is only a rapid movement of the toolhead, not printing, it will run around 200 mm/s
I think the simple solution (after all you’ve been through) is to not move the toolhead that fast.
So to sum this up: you just did not try the right SGT value before or was there anything I missed here?
Sorry about that, just called my old parents. That always confuses me.
The second important thing is using DIAG0. Also see GitHub - andrewmcgr/klipper_tmc_autotune: TMC stepper driver autotuning Klipper python extra
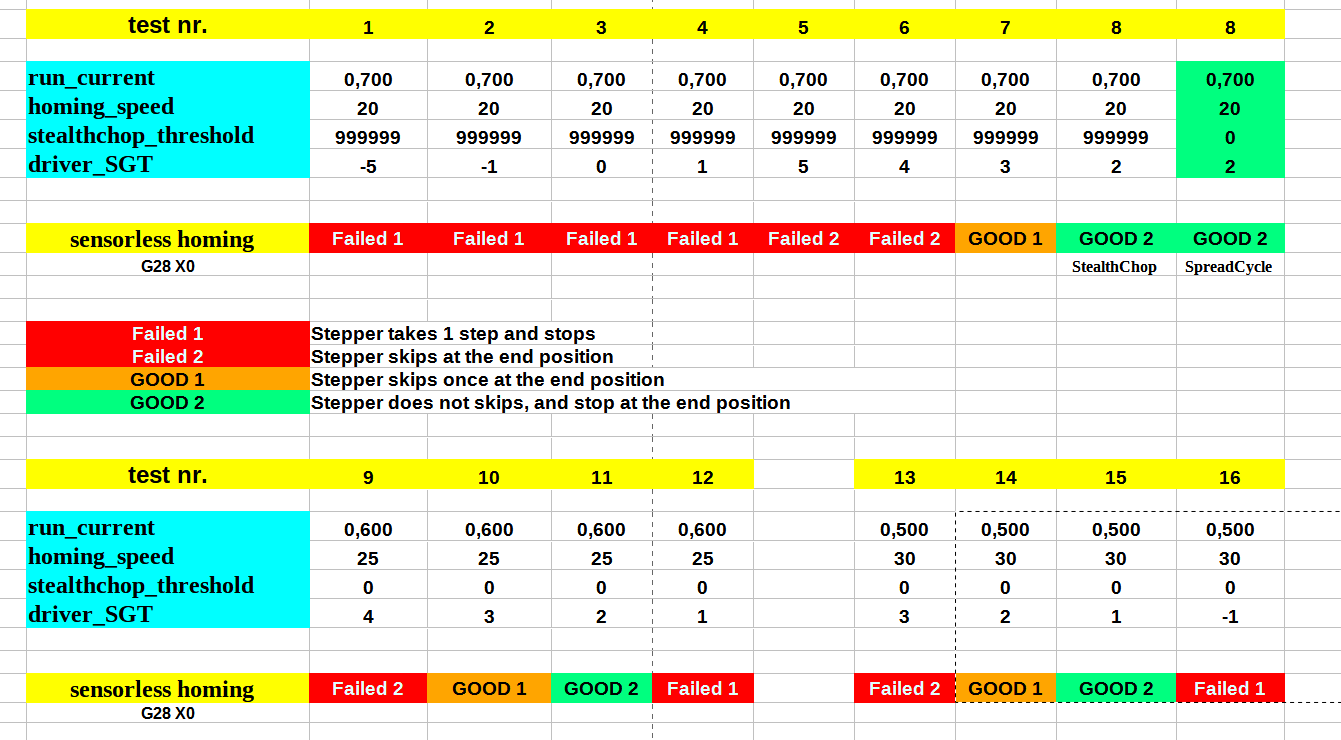
Just looking at your table:

and I was thinking you might want to expand your variables a bit - try 0.6A for your run_current and 25 for your homing_speed.
These are the values that I am using and I’m getting a better range of values where StallGuard works instead of the single value that you’re getting.
HI @mykepredko ¨
so I did more tests and it’s the same, just too sensitive.
the best combination is marked “green”
-Petr
Interesting that the chip is that sensitive to only have one working value for sensorless homing.
I don’t know what else to say other than I’m happy things are working for you.