Printer Model: Voron 2.4 awd
MCU / Printerboard: 2x Octopus v1.1 using external 48v tmc5160 for x and y drive motors
Host / SBC BTT PI
running Kalico Klipper and also I have TMC autotune installed
Hi I’m quite new to this and have been trying to set up sensorless homing on my printer, at the moment I have gotten it to either retract and give me the message “endstop still triggered after retract” at both min and max SGT sensivity or when I invert the diag pin it will move in the correct direction and then crash at the where the endstop should be no matter the sensitivity I set it at.
Any help is greatly appreciatted.
Many thanks
Nicholas
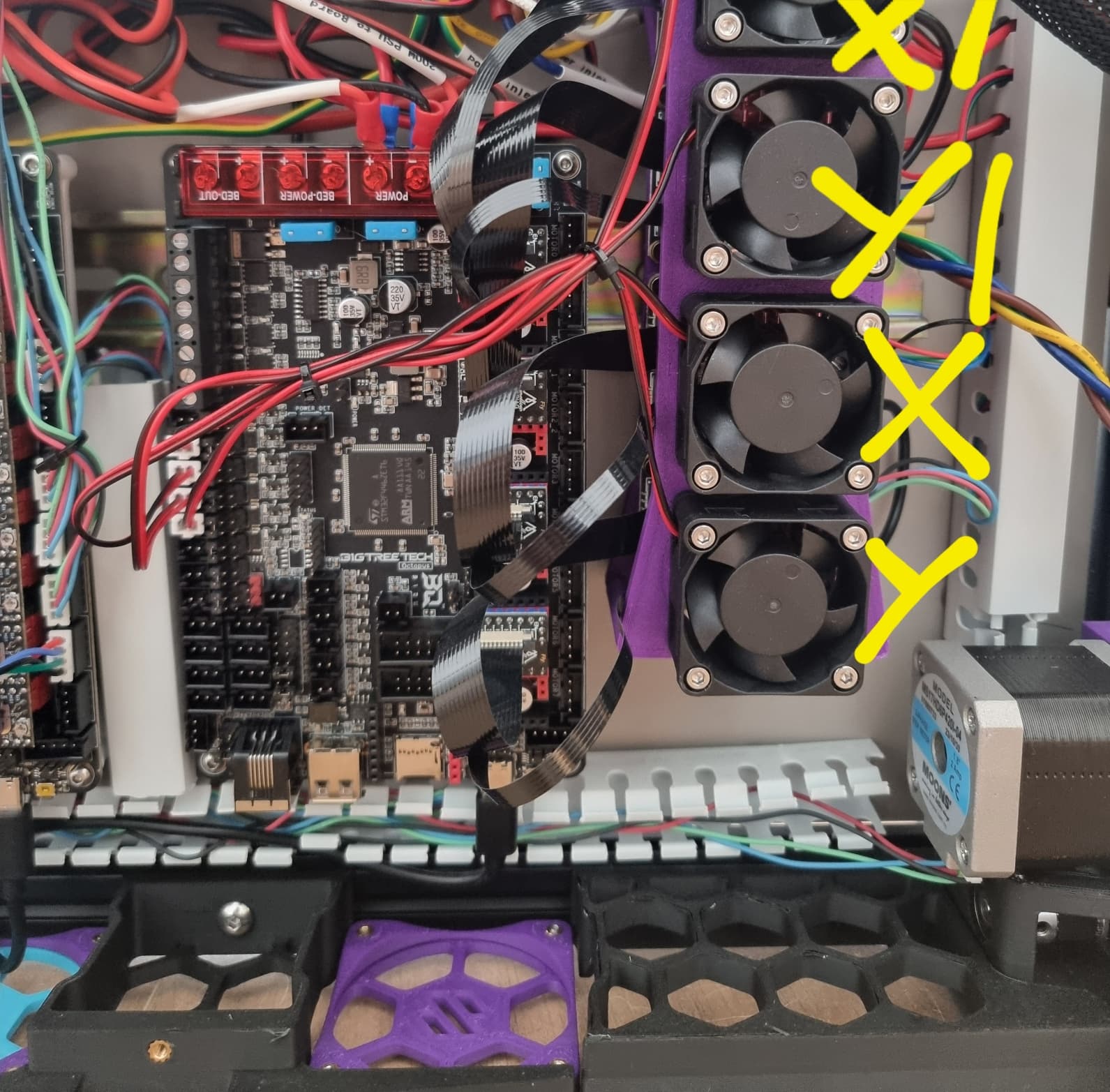
here are some images of the mainboard for the drive motors and the diag pin jumpers
Amazingly how sensitive some TMCs are. A span of 3 from 128 values? I wonder, if we shouldn’t ask an FAE from ADI for some help. Maybe there is a way to make the drivers more sensitive. I think, “Ed’s 3d Tech” videos are always pretty good. He mentiones a similar behaviour https://www.youtube.com/watch?app=desktop&v=9E-sCKlTMHk.