I’ve worked with the Trigorilla V1.0.4 (which uses the HC32F460 MCU that @Sineos mentioned) but not the V4.0.1 and its different MCU.
Based on my experience with the V1.0.4, I wouldn’t recommend a Trigorilla main controller board to anyone (no schematics, very poor documentation and requires user rework to get the TMC stepper drivers to work in UART mode).
The easiest way to get the printer up and running (which, I suspect will void the Anycubic warranty but you want to do that anyway) is to buy a BTT or MKS main controller board.
Sorry, I don’t have any better suggestion. I just reacted when you indicated that Anycubic said that putting on Klipper would void the warranty.
I would have returned it too, but i bought it on aliexpress and my 15 days “customer protection” already expired and i would have to return it throuh anycubic support. Because of that i want to try to install klipper on it several more times and then think about selling it on the secondary market or returning it to anycubic.
I think i’ve found anycubic github repo. If they will upload the source code for kobra 2 neo firmware then we will be able to (hopefully) compile klipper to work properly and then write configs. I think i should check it from time to time.
And i think i’ve had enough of it and i should post HiDpi scans of the mainboard and start reverse-engineering it. If anybody think they could help me with that i’ll start working on it tomorrow.
That was a long time since the last update, but there is a little update about the stock marlin firmware. Anycubic didn’t made any updates to the firmware and it is still glitchy as hell. But, i found a very obscure setting deep inside the printer, and it is input shaping. In the settings of printer you cannot reach this setting, BUT you can still change it through eeprom editor, i’ve used the octoprint plugin but there is definetely more alternatives. In the stock firnware it was tuned to 42 hertz (i think) and dumping factor was 0.15 (i think). And code monkeys at anycubic tuned it so badly that it was actually printing WORSE with this setting, and a little bit better with input shaping turned off. I was tuning input shaping for the last few days, and these are my settings.
After changing that i can clearly see that my prints quality greatly improved. I am pretty sure that the frequency is already tuned quite well but i am not sure about damping factor. I was getting very diffrent results just by tuning the zeta factor but i am open for suggestions. I think that may help someone.
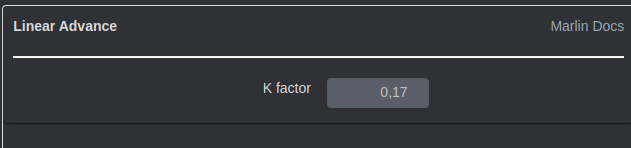
Also, these are my linear advance settings, they can improve the quality a little bit as well.
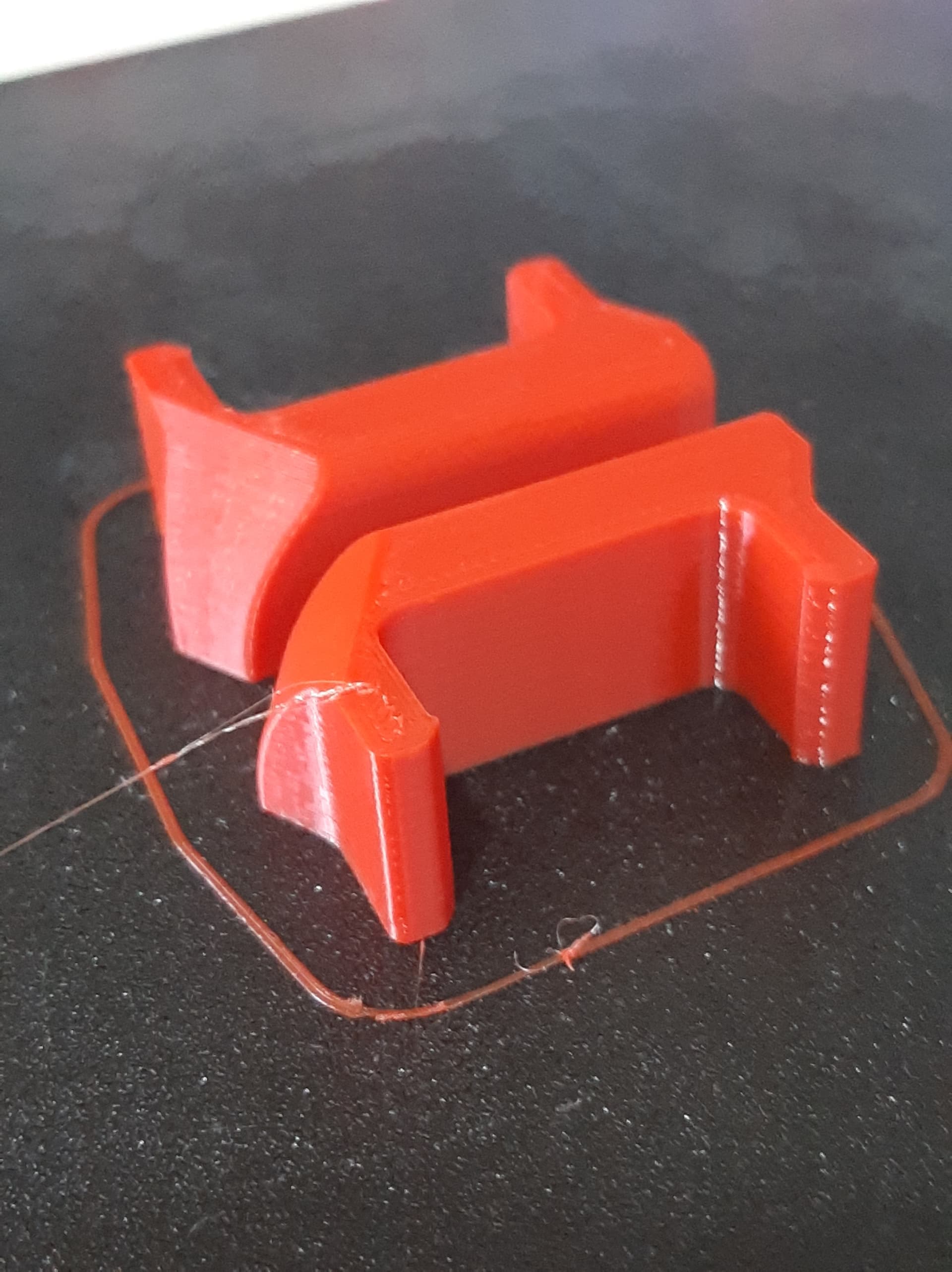
And this is a little print that i’ve done very recently. This is PETG at 222/80 and printed on 80mm/s for the outer perimeters and 120mm/s for the rest.
Yay. I’ve been going back and forth with them demanding source for the last month, I finally told them it wasnt legal for them to keep holding back source, even for testing reasons…and then the next message they responded by posting the firmware.
I flashed my kobra 2 neo with the instructions mentioned above. The small screen showed that a firmware would be flashed, but after minutes nothing happened. and when reading the firmware.bin file, it did not changed the file format to .cur.
thank you so much sineos for helping, i really appreciate that and probably start on working right after i would manage to flash my board because it is not flashing still)